Poquito a poco se está demostrando que las aplicaciones robóticas de dos piernas son los más aptos para imitar los movimientos que realizamos y para moverse por nuestro entorno. El Laboratorio de Autonomía Dinámica y Robótica Inteligente (su acrónimo en inglés DAIR) está entrenado una nueva aplicación robótica. Se llama Cassie, y como hemos indicado es un robot bípedo y activo creado por la compañía de robótica Agility Robotics. A fin de que podáis haceros idea, recordaros que es el hermano mayor de Digit, el robot que está siendo entrenado por Ford para llevar bultos a nuestras viviendas.
Este robot ha sido desarrollado para investigar los algoritmos que diseñan en este laboratorio con el fin de asistir a que otros robots puedan andar y moverse por todo tipo de terrenos.
Los robots que se desplazan mediante dos piernas son más prácticos a la hora de sortear objetos y personas, así como subir escalones. “Esto es útil en todo tipo de aplicaciones, incluida la exploración básica, pero asimismo en tareas de salvamento en catástrofes e en inspección de espacios. Eso es lo que está atrayendo la atención de la industria en estos días” afirma Michael Posa, delegado de la Escuela de Ingeniería y Ciencias Aplicadas.
2 estudiantes graduados en el DAIRLab supervisan y probar los algoritmos que allí desarrollan en Cassie. Se redacta el código en un computador y se ejecuta con el robot. “En general, si no marcha en la prueba, no va a funcionar en el mundo real” afirma el ingeniero.
Tal como señalan, hacer que funcione el algoritmo de Inteligencia Artificial es complicado, puesto que el robot es un punto indeterminado en vez de una máquina real, es decir, un robot bípedo, por tanto, hay que educar el algoritmo.
Una vez se ha testado la respuesta de Cassie al algoritmo, los investigadores pueden readaptar lel código que se ha introducido. Una de las principales ventajas de trabajar con robots es que se les puede poner a prueba llevándolos hasta el límite de sus posibilidades.
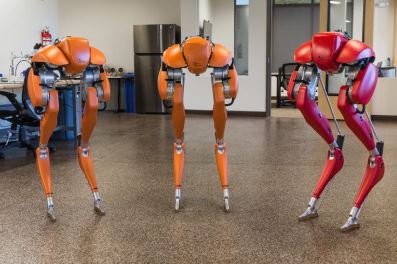
De las extremidades del robot resalta que sus rodillas se doblan hacia dentro, es decir, en sentido opuesto, lo que le ayuda a bajar por los escalones. Sin embargo su movimiento es hiperrealista si lo equiparamos con el de los humanos, del mismo modo que la velocidad que es capaz de alcanzar.
Desarrollar los puntos de movimiento de Cassie es estudiar en el desarrollo de los futuros robots de dos piernas que serán puestos en el mercado. Un caso es el robot Digit, el cual ya es testeado en trabajos de entrega a domicilio, aunque sus capacidades les van a permitir trabajar en muchos otros campos, ya sea como robots de rescate o bien para trabajar en zonas de riesgo.